
ฟรีและดีที่สุด คอร์สอบรม Arduino + NodeMCU
ทำเพื่อแบ่งปัน ห้ามนำไปจำหน่าย หรือเก็บเงินค่าเรียน !!!


AllNewStep รับประกันคุณภาพทุกชิ้น วันจันทร์-ศุกร์แจ้งชำระสินค้าก่อน 14.00 จัดส่งทันทีวันนี้ค่ะ
กรุงเทพ /ภาคกลาง ได้พรุ่งนี้
*** สินค้าทุกชิ้น ถ้าสามารถทำรายการสั่งซื้อได้ แสดงว่ามีครบทุกรายการค่ะ ***
พอจะมีตัวอย่างการควบคุมมอเตอร์ 3 Phase 220v Ac ด้วย arduino PWM ไหมครับ
-หมุนซ้าย -ขวา
-คุมความเร็ว
เราจะสร้าง PWM 3 สัญญาณห่างกันที่ 120 องศา ได้อย่างไร เอาเฉพาะส่วนของชุด Low Volt ก็ได้ครับ

ถ้าต้องการควบคุมเป็นองศาลองดู servo
ถ้าต้องการควบคุม Stepper Motor ตามลิงค์นี้ครับ https://www.arduino.cc/en/Tutorial/StepperSpeedControl
ช่วยอธิบายหน่อยได้ไหมครับว่า โปรแกรมทำงานอย่างไร
คือผมดูประมาณว่าเป็นโปรแกรมสร้างความถี่ sine wave 31250 KHz มุมองศาทางไฟฟ้า 120 องศา ชนิด 3 เฟส output ขา 10 11 3 มันมีส่ว
นของคำสั่งที่ทำใน Register ไม่เข้าใจเลยครับ ผมจะหาข้อมูลการกระทำของคำสั่งเหล่านี้ได้ที่ไหน
/*
*
* DDS Sine Generator mit ATMEGS 328
* Timer2 generates the 31250 KHz Clock Interrupt
* Use Timer2 Interrupt to change duty cycle for the output PWM signals
* D. Tolken
* 120 degress out of phase signals for 3 phase BLDC motor controller
* CPUT, South Africa
a Huge thumbs up and thanks must be given to Martin Nawrath for the developement of the original code to generate a sine wave using PWM and a LPF.
Link:
http://interface.khm.de/index.php/lab/experiments/arduino-dds-sinewave-generator/
*/
#include "avr/pgmspace.h" //Store data in flash (program) memory instead of SRAM
// Look Up table of a single sine period divied up into 256 values. Refer to PWM to sine.xls on how the values was calculated
PROGMEM prog_uchar sine256[] = {
127,130,133,136,139,143,146,149,152,155,158,161,164,167,170,173,176,178,181,184,187,190,192,195,198,200,203,205,208,210,212,215,217,219,221,223,225,227,229,231,233,234,236,238,239,240,
242,243,244,245,247,248,249,249,250,251,252,252,253,253,253,254,254,254,254,254,254,254,253,253,253,252,252,251,250,249,249,248,247,245,244,243,242,240,239,238,236,234,233,231,229,227,225,223,
221,219,217,215,212,210,208,205,203,200,198,195,192,190,187,184,181,178,176,173,170,167,164,161,158,155,152,149,146,143,139,136,133,130,127,124,121,118,115,111,108,105,102,99,96,93,90,87,84,81,78,
76,73,70,67,64,62,59,56,54,51,49,46,44,42,39,37,35,33,31,29,27,25,23,21,20,18,16,15,14,12,11,10,9,7,6,5,5,4,3,2,2,1,1,1,0,0,0,0,0,0,0,1,1,1,2,2,3,4,5,5,6,7,9,10,11,12,14,15,16,18,20,21,23,25,27,29,31,
33,35,37,39,42,44,46,49,51,54,56,59,62,64,67,70,73,76,78,81,84,87,90,93,96,99,102,105,108,111,115,118,121,124
};
#define cbi(sfr, bit) (_SFR_BYTE(sfr) &= ~_BV(bit)) //define a bit to have the properties of a clear bit operator
//กำหนด บิต จะมี คุณสมบัติของ ผู้ประกอบการ บิต ที่ชัดเจน
#define sbi(sfr, bit) (_SFR_BYTE(sfr) |= _BV(bit))//define a bit to have the properties of a set bit operator
//กำหนด บิต จะมี คุณสมบัติของ ผู้ประกอบการ ชุด บิต
int PWM1= 11;// PWM1 output, phase 1
int PWM2 = 3; //[WM2 ouput, phase 2
int PWM3 = 10; //PWM3 output, phase 3
int offset_1 = 85; //offset 1 is 120 degrees out of phase with previous phase, Refer to PWM to sine.xls
int offset_2 = 170; //offset 2 is 120 degrees out of phase with offset 1. Refer to PWM to sine.xls
int program_exec_time = 6; //monitor how quickly the interrupt trigger
int ISR_exec_time = 7; //monitor how long the interrupt takes
double dfreq;
const double refclk=31376.6; // measured output frequency
// variables used inside interrupt service declared as voilatile
volatile byte current_count; // Keep track of where the current count is in sine 256 array
volatile byte ms4_delay; //variable used to generate a 4ms delay
volatile byte c4ms; // after every 4ms this variable is incremented, its used to create a delay of 1 second
volatile unsigned long phase_accumulator; // pahse accumulator
volatile unsigned long tword_m; // dds tuning word m, refer to DDS_calculator (from Martin Nawrath) for explination.
void setup()
{
pinMode(PWM1, OUTPUT); //sets the digital pin as output
pinMode(PWM2, OUTPUT); //sets the digital pin as output
pinMode(PWM3, OUTPUT); //sets the digital pin as output
pinMode(program_exec_time, OUTPUT); //sets the digital pin as output
pinMode(9, OUTPUT); //sets the digital pin as output
sbi(PORTD,program_exec_time); //Sets the pin
Setup_timer1();
Setup_timer2();
//Disable Timer 1 interrupt to avoid any timing delays
cbi (TIMSK0,TOIE0); //disable Timer0 !!! delay() is now not available
sbi (TIMSK2,TOIE2); //enable Timer2 Interrupt
dfreq=1000.0; //initial output frequency = 1000.o Hz
tword_m=pow(2,32)*dfreq/refclk; //calulate DDS new tuning word
}
void loop()
{
while(1)
{
sbi(PORTD,program_exec_time); //Sets the pin
if (c4ms > 250) // c4ms = 4ms, thus 4ms *250 = 1 second delay
{
c4ms=0; //Reset c4ms
dfreq=analogRead(0); //Read voltage on analog 1 to see desired output frequency, 0V = 0Hz, 5V = 1.023kHz
cbi (TIMSK2,TOIE2); //Disable Timer2 Interrupt
tword_m=pow(2,32)*dfreq/refclk; //Calulate DDS new tuning word
sbi (TIMSK2,TOIE2); //Enable Timer2 Interrupt
}
}
}
//Timer 1 setup
//Set prscaler to 1, PWM mode to phase correct PWM, 16000000/510 = 31372.55 Hz clock
void Setup_timer1(void)
{
// Timer1 Clock Prescaler to : 1
sbi (TCCR1B, CS10);
cbi (TCCR1B, CS11);
cbi (TCCR1B, CS12);
// Timer1 PWM Mode set to Phase Correct PWM
cbi (TCCR1A, COM1A0);
sbi (TCCR1A, COM1A1);
cbi (TCCR1A, COM1B0);
sbi (TCCR1A, COM1B1);
// Mode 1 / Phase Correct PWM
sbi (TCCR1A, WGM10);
cbi (TCCR1A, WGM11);
cbi (TCCR1B, WGM12);
cbi (TCCR1B, WGM13);
}
//Timer 1 setup
//Set prscaler to 1, PWM mode to phase correct PWM, 16000000/510 = 31372.55 Hz clock
void Setup_timer2()
{
// Timer2 Clock Prescaler to : 1
sbi (TCCR2B, CS20);
cbi (TCCR2B, CS21);
cbi (TCCR2B, CS22);
// Timer2 PWM Mode set to Phase Correct PWM
cbi (TCCR2A, COM2A0); // clear Compare Match
sbi (TCCR2A, COM2A1);
cbi (TCCR2A, COM2B0);
sbi (TCCR2A, COM2B1);
// Mode 1 / Phase Correct PWM
sbi (TCCR2A, WGM20);
cbi (TCCR2A, WGM21);
cbi (TCCR2B, WGM22);
}
//Timer2 Interrupt Service at 31372,550 KHz = 32uSec
//This is the timebase REFCLOCK for the DDS generator
//FOUT = (M (REFCLK)) / (2 exp 32)
//Runtime : 8 microseconds
ISR(TIMER2_OVF_vect)
{
cbi(PORTD,program_exec_time); //Clear the pin
sbi(PORTD,ISR_exec_time); // Sets the pin
phase_accumulator=phase_accumulator+tword_m; //Adds tuning M word to previoud phase accumulator. refer to DDS_calculator (from Martin Nawrath) for explination.
current_count=phase_accumulator >> 24; // use upper 8 bits of phase_accumulator as frequency information
OCR2A=pgm_read_byte_near(sine256 + current_count); // read value fron ROM sine table and send to PWM
OCR2B=pgm_read_byte_near(sine256 + (uint8_t)(current_count + offset_1)); // read value fron ROM sine table and send to PWM, 120 Degree out of phase of PWM1
OCR1A = pgm_read_byte_near(sine256 + (uint8_t)(current_count + offset_2));// read value fron ROM sine table and send to PWM, 120 Degree out of phase of PWM2
OCR1B = pgm_read_byte_near(sine256 + (uint8_t)(current_count + offset_2));// read value fron ROM sine table and send to PWM, 120 Degree out of phase of PWM2
//increment variable ms4_delay every 4mS/125 = milliseconds 32uS
if(ms4_delay++ == 125)
{
c4ms++;
ms4_delay=0; //reset count
}
cbi(PORTD,ISR_exec_time); //Clear the pin
}
//http://forum.arduino.cc/index.php?topic=121727.0
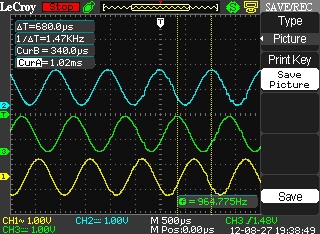
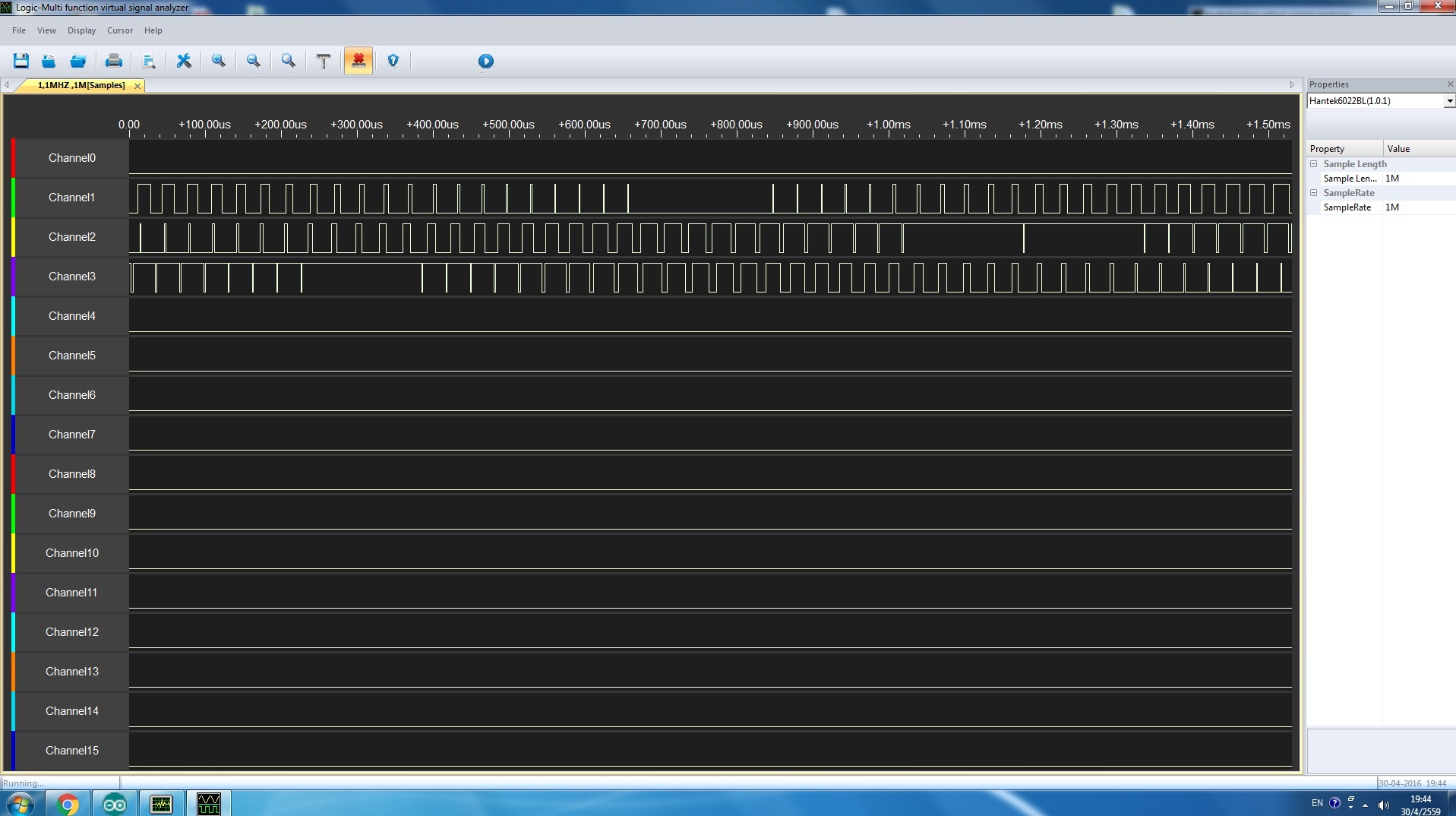
ถ้าแกะโปรตัวนี้ได้ ทำอะไรมากกว่าที่คิดครับ ผมลอง run ดูแล้ว ใช้ Scope วัดขา output มันก็ทำงานนะครับเพียงแต่ว่าไม่ผ่านชุด Lowpass ฟิลเตอร์ ทำให้มองไม่เป็นรูป Sine wave ประเภทคำสั่ง เช่น ประมาณนี้จะหาข้อมูลเพิ่มที่ไหนครับ
cbi (TCCR2A, COM2A0); // clear Compare Match
sbi (TCCR2A, COM2A1);
cbi (TCCR2A, COM2B0);
sbi (TCCR2A, COM2B1);
คล้ายกับการกระทำระดับ bit เหมือนภาษา assembly แบบนั้นหรือเปล่า ที่เราใช้กันอยู่ก็พื้นฐาน In เข้า Out ออก วน Loop
ส่วนของ Low pass fillter
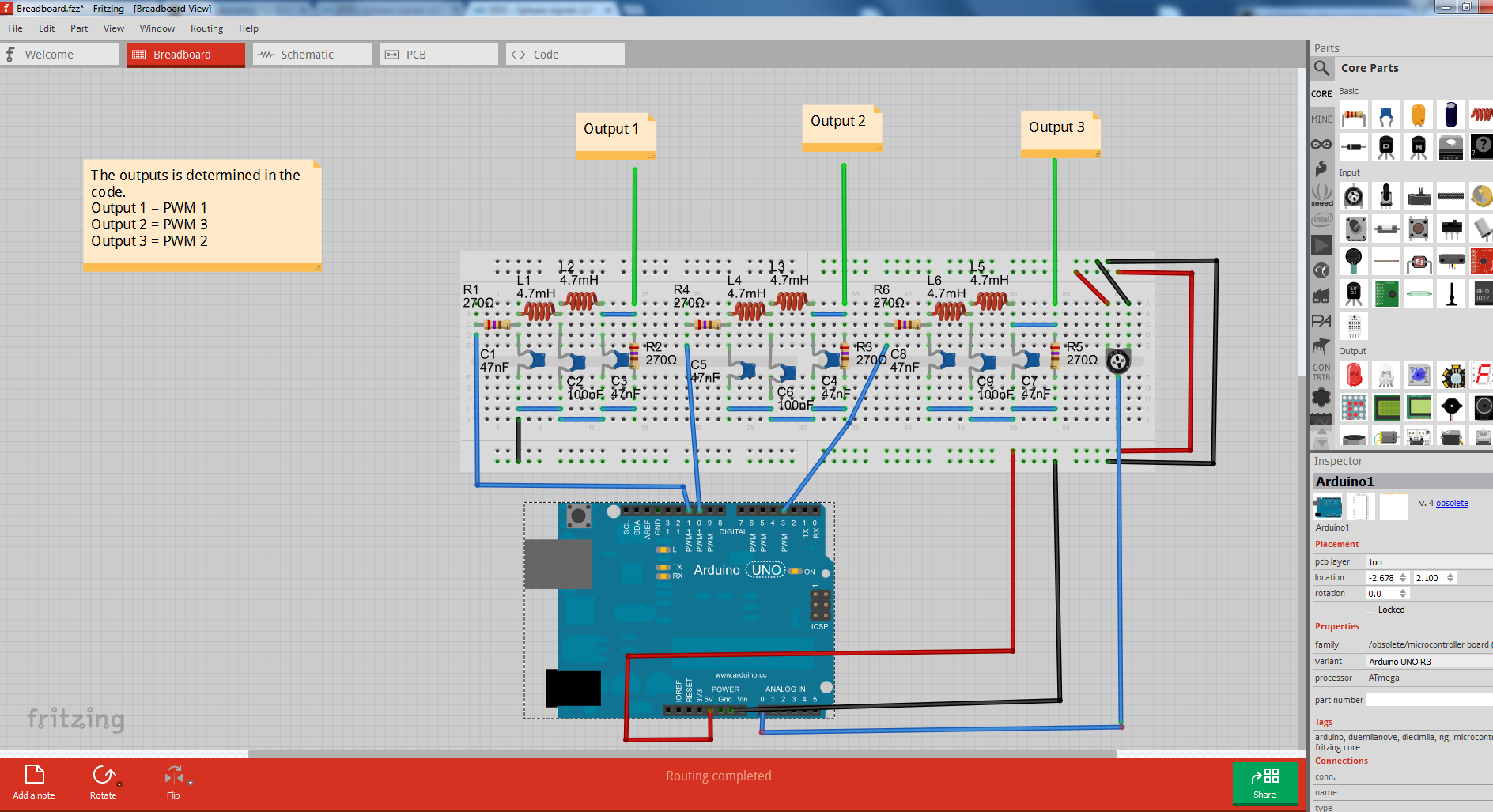







 ArduinoAll ขาย Arduino ซื้อ Arduino ทุกอย่าง เปลี่ยนชื่อเป็น AllNewStep
ArduinoAll ขาย Arduino ซื้อ Arduino ทุกอย่าง เปลี่ยนชื่อเป็น AllNewStep
 ธ.กรุงไทย
ธ.กรุงไทย
